
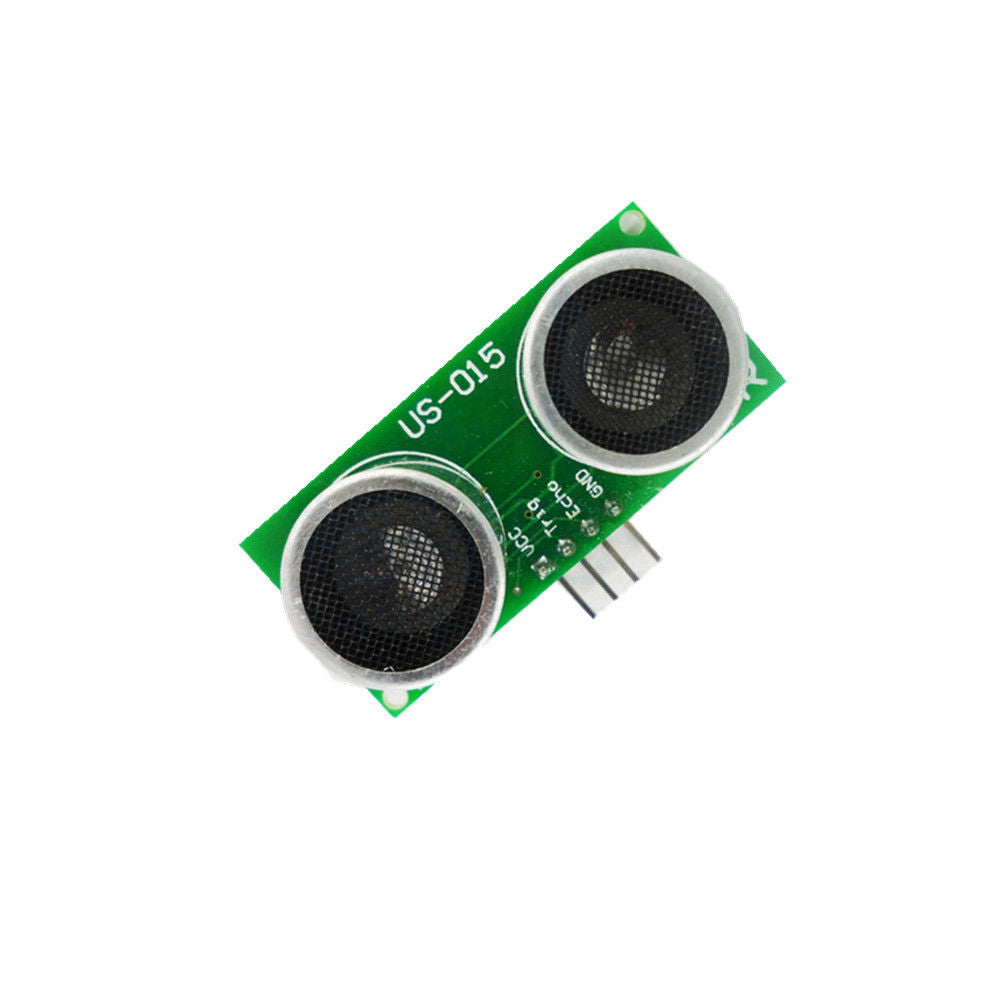




Description
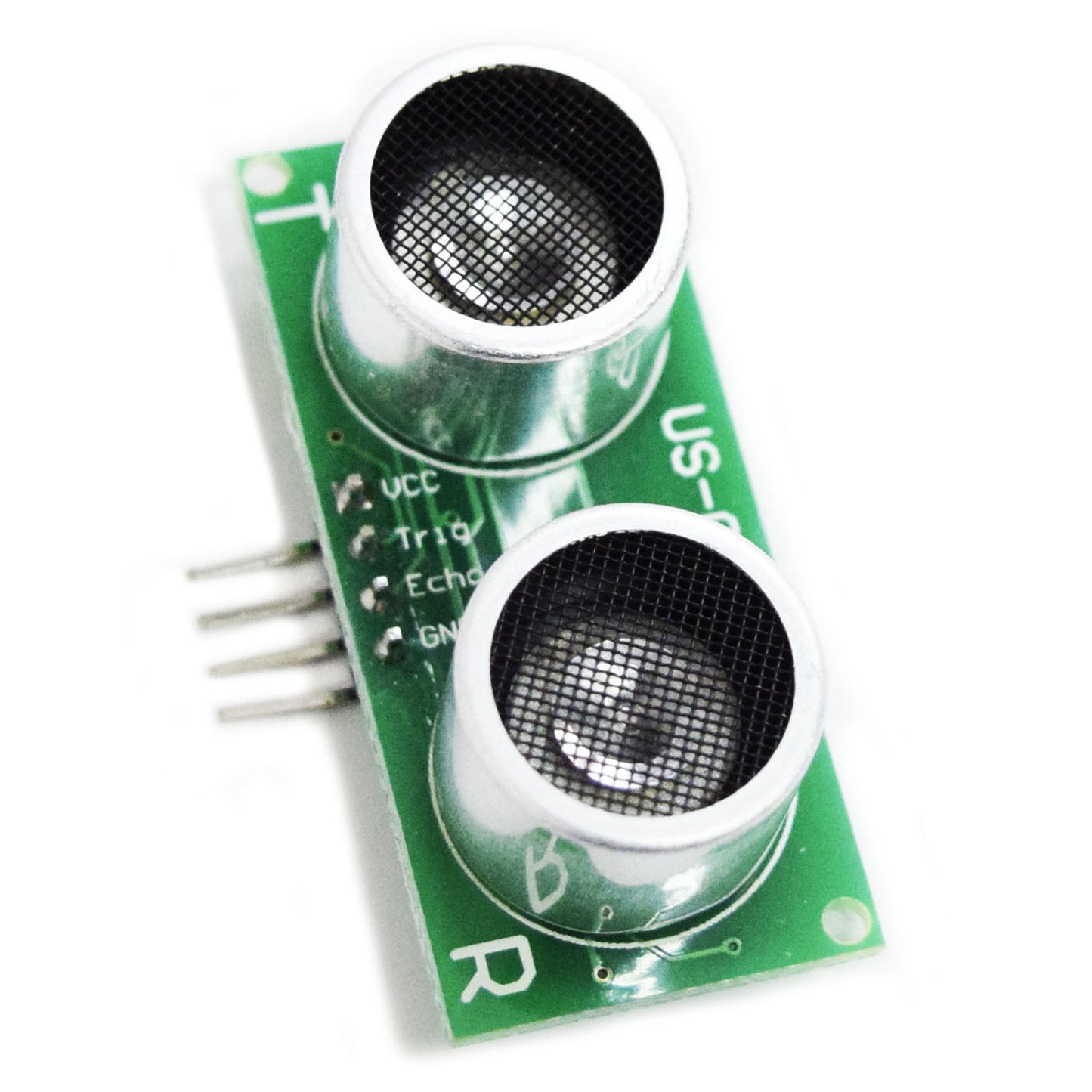
This US-015 ultrasonic sensor is your perfect sensor for distance measurement and object detection. It offers excellent range accuracy up to (1mm) and fairly stable readings at a very low cost. It requires two digital I/O pins (an output pin and an input pin) to interface with it.
The ultrasonic sensor is created based on the principle of echolocation used by animals like bats and dolphins. Since the ultrasonic sensor uses sonar to determine the distance to an object, its operation is not affected by sunlight, spotlight, and object's surface color which will affect the readings of any infrared distance sensors. However acoustically soft materials such as clothes can be difficult to detect.
Features
- Operating Voltage : DC 5V
- Current : 2.2mA
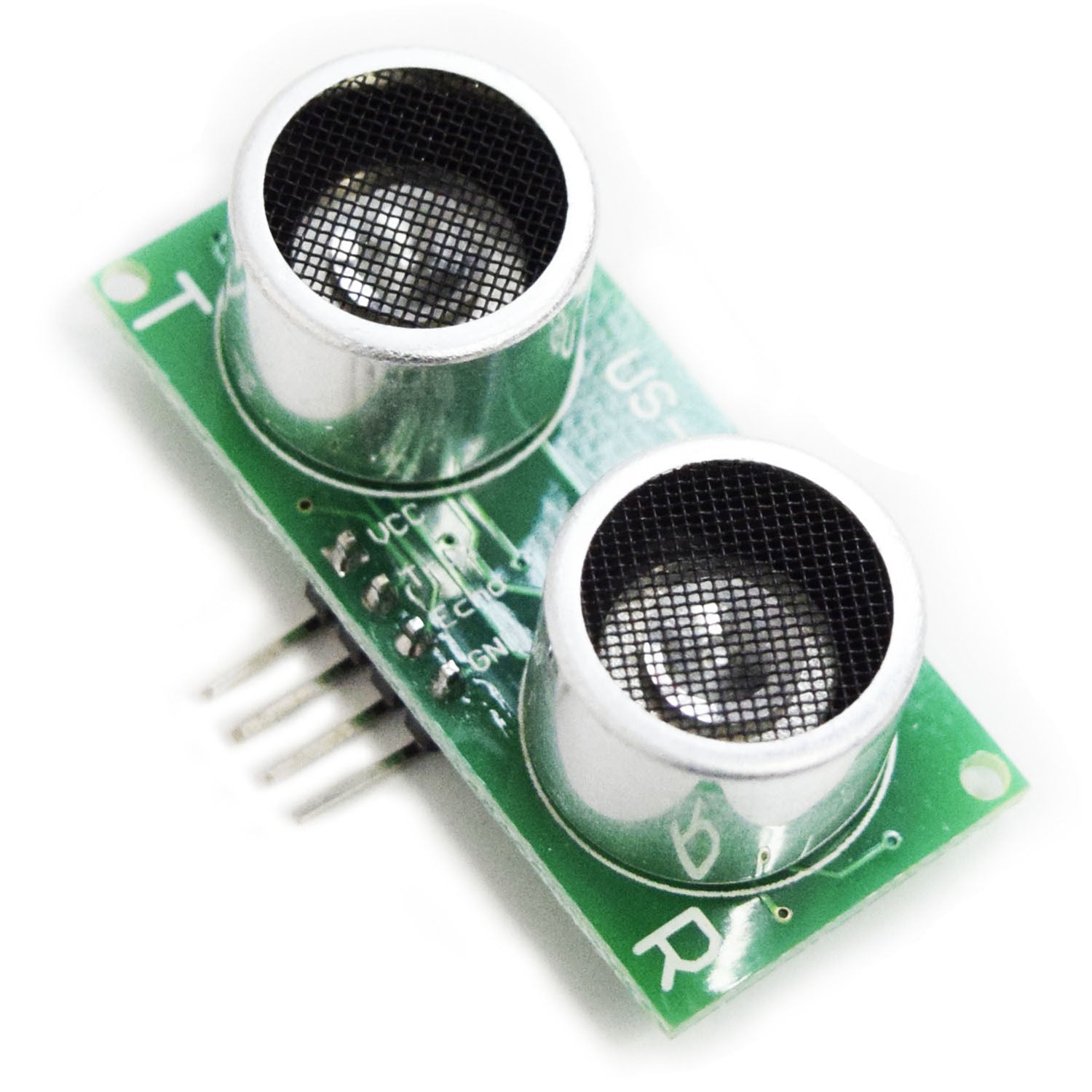
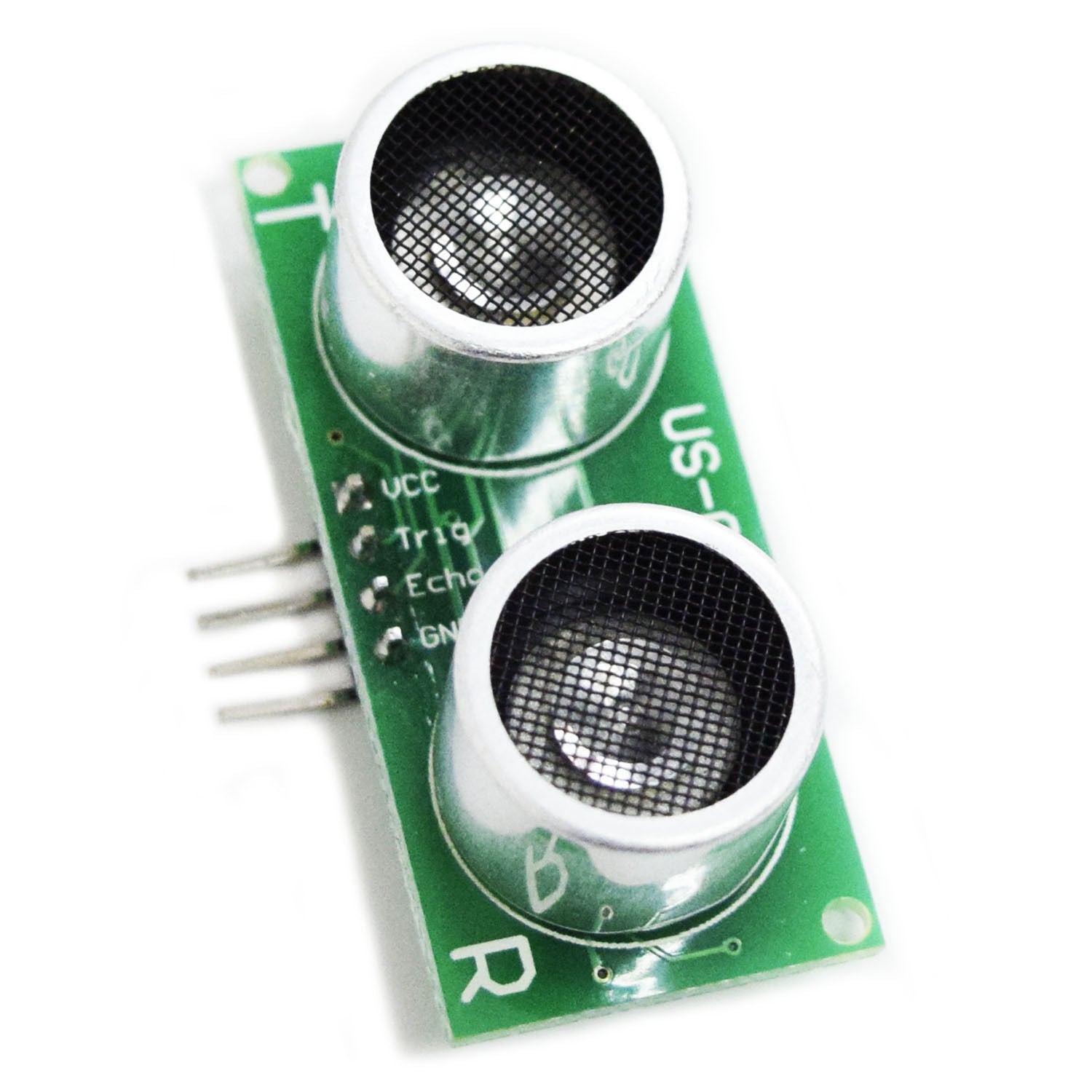
- PinOut : 4 PIN Sensing
- Range : 2 - 400cm
- Sensing Angle : less than 15deg
- Accuracy : 0.1cm+-5%
- Advantages : Better accuracy than HCSR04
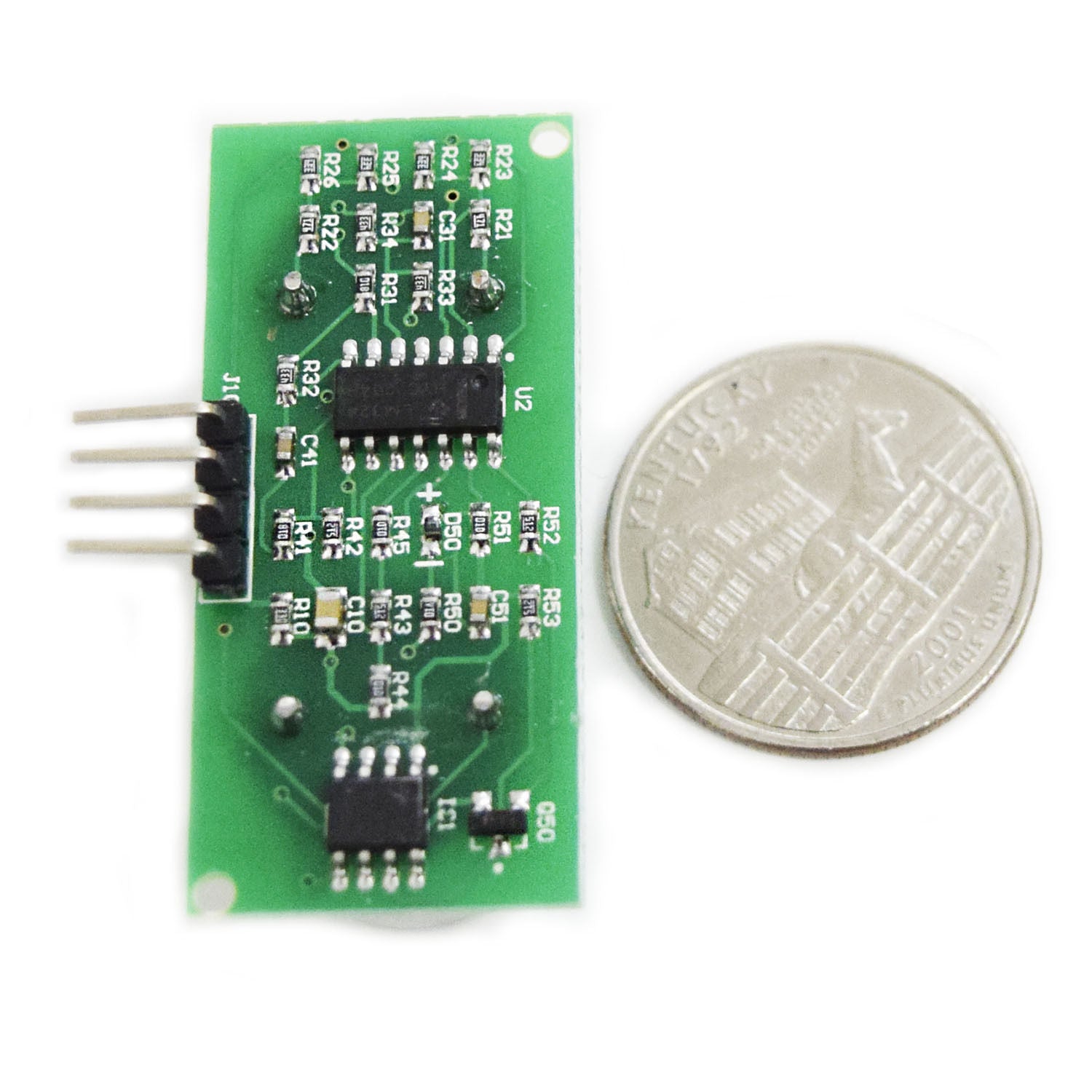
- Size (mm): 45 (L) x 20 (W) x 16 (H)
- Weight : 10 g
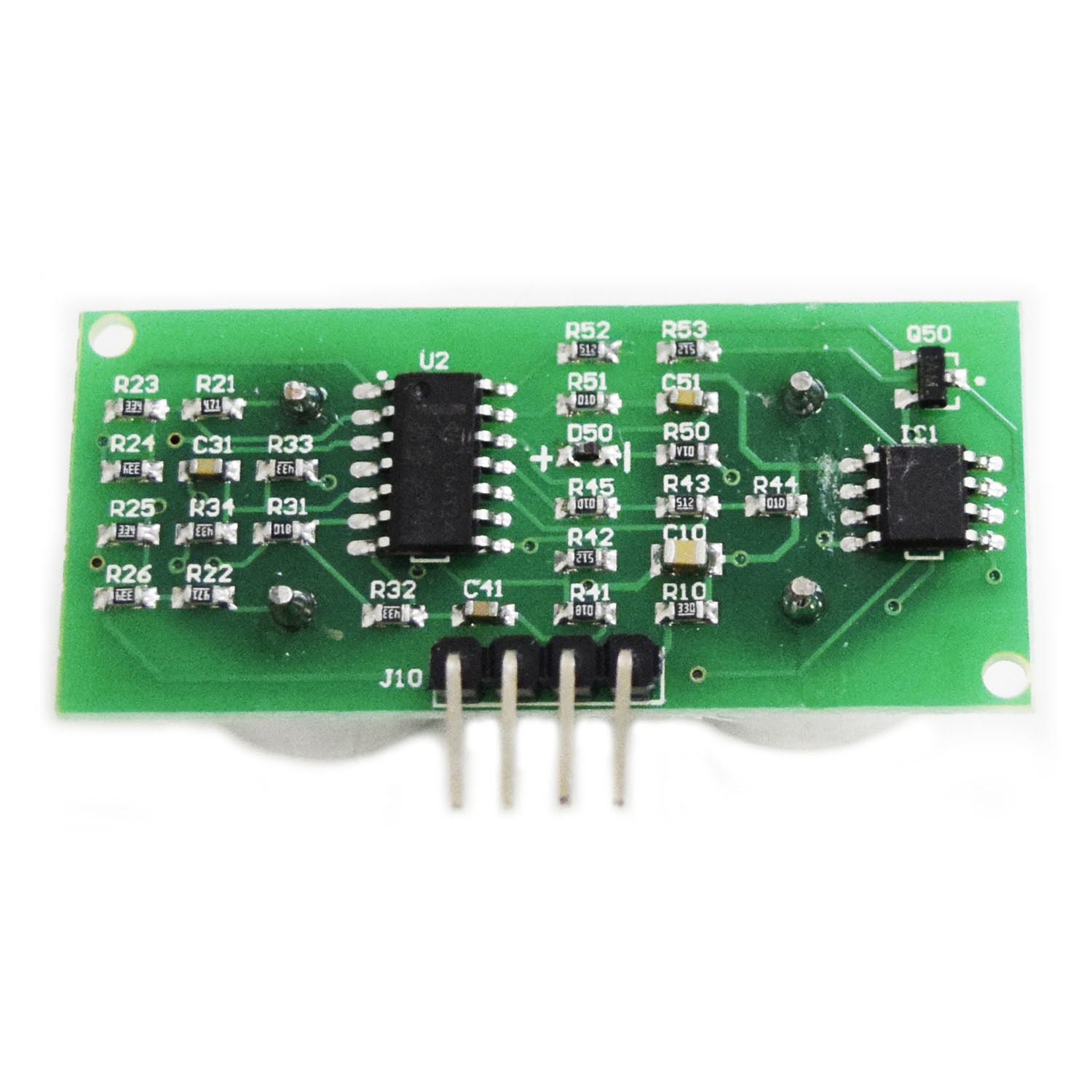
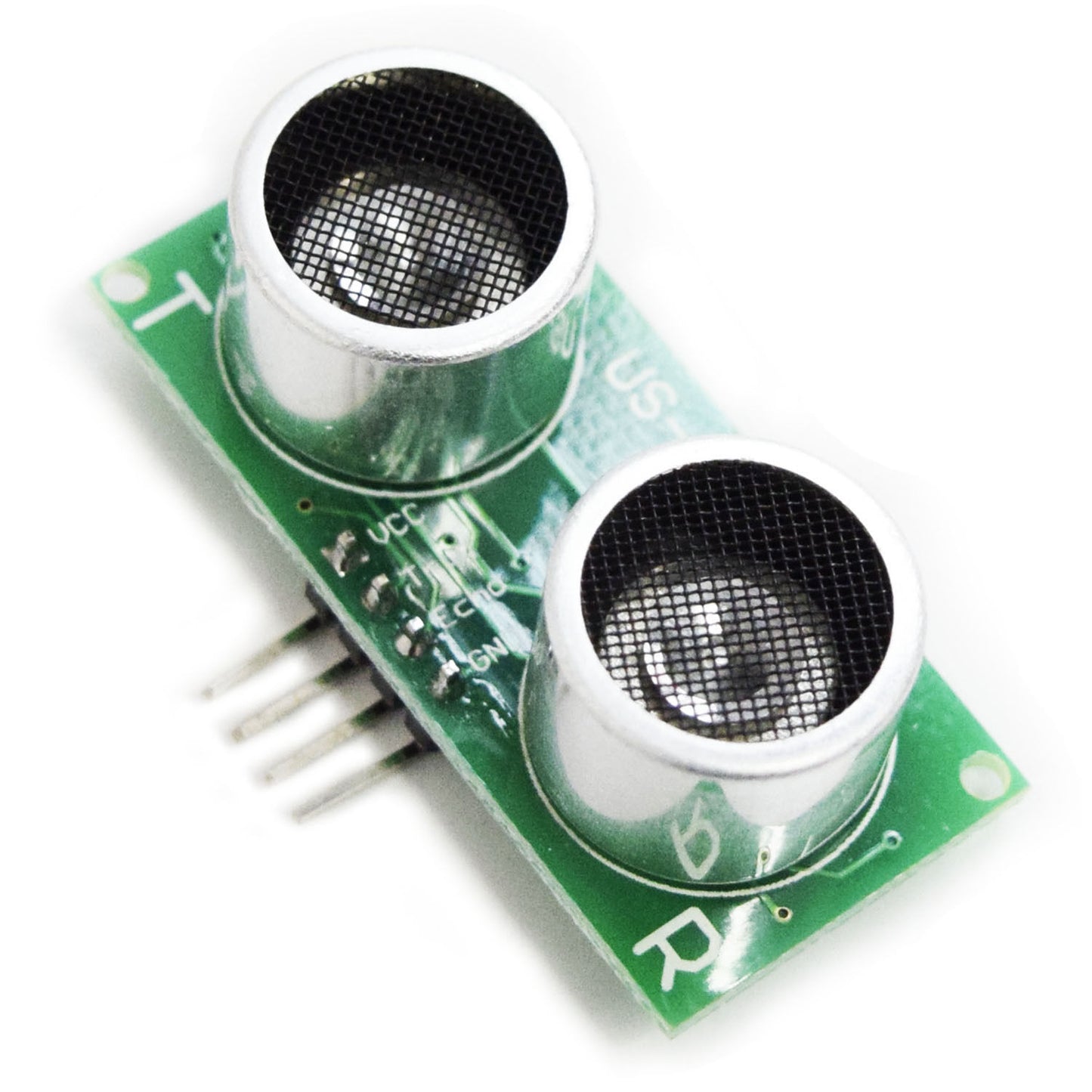
Pinout

Necessary hardware to follow this guide
- Arduino Uno
- US High Accuracy Ultrasonic Sensor module
- Male to female jumper wires
- Half breadboard

Hardware Interface/Setup
- Its working is quite simple, it has a trigger and an echo pin.
- A signal of +5V is sent over to Trigger pin.
- When ultrasonic sensor gets a trigger signal on its trigger pin then it emits an ultrasonic signal
- from the transmitter.
- This ultrasonic senor, then goes out and reflected back after hitting some object in front.
- This reflected ultrasonic signal is then captured by the receiver of ultrasonic sensor.
- As the sensor gets this reflected signal, it automatically make the Echo pin high.
- The time for which the Echo pin will remain HIGH, depends on the reflected signal.
Code
#include <NewPing.h>
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
Serial.print("Ping: ");
Serial.print(sonar.ping_cm());
Serial.println("cm");
}